


泰克示波器抖動(dòng)測(cè)量-示波器測(cè)量的最高境界(上)
抖動(dòng)話題是示波器測(cè)量的最高境界,也是最風(fēng)云變換的一個(gè)話題,這是因?yàn)槎秳?dòng)是示波器測(cè)量的諸多功能中最和“數(shù)學(xué)”相關(guān)的。玩數(shù)學(xué)似乎是需要一定境界的。
1,抖動(dòng)和波形余輝的關(guān)系
有一種比較傳統(tǒng)的測(cè)量抖動(dòng)的方法,就是利用余輝來(lái)查看信號(hào)邊沿的變化,然后再用光標(biāo)測(cè)量變化的大小(如圖1所示)。后來(lái)高端一點(diǎn)的泰克示波器具有“余輝直方圖”的功能,利用余輝直方圖和相關(guān)參數(shù)可以自動(dòng)測(cè)量出信號(hào)邊沿變化的余輝的變化范圍。 在上個(gè)世紀(jì)90年代初示波器有了真正意義的“測(cè)量統(tǒng)計(jì)”功能之后,這個(gè)方法就逐漸被淘汰了。
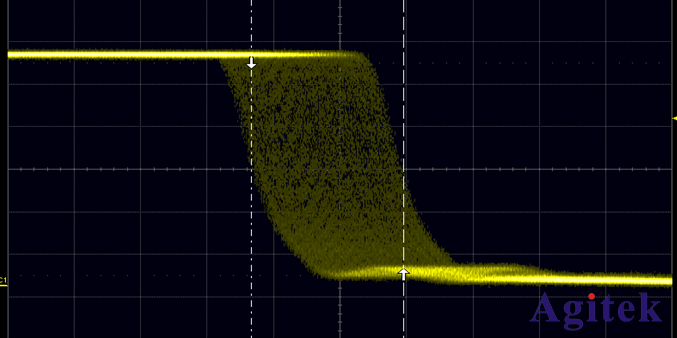
圖1 傳統(tǒng)的抖動(dòng)測(cè)量方法
這種傳統(tǒng)的方法有下面這些缺點(diǎn):(1)總會(huì)引入觸發(fā)抖動(dòng),因此測(cè)量的結(jié)果很不準(zhǔn)確。(2)只能測(cè)量部分參數(shù)的抖動(dòng),譬如觸發(fā)上升沿,測(cè)量下降沿的余輝變化,反應(yīng)了寬度的抖動(dòng),觸發(fā)上升沿,測(cè)量相鄰的上升沿的余輝變化,反應(yīng)了周期的抖動(dòng)。顯然還有很多類型的抖動(dòng)特別是最重要的TIE抖動(dòng)無(wú)法測(cè)量出來(lái)。 (3)抖動(dòng)產(chǎn)生的因果關(guān)系的信息也無(wú)從得知。
2,定義抖動(dòng)的四個(gè)維度
和抖動(dòng)相關(guān)的名詞非常多:時(shí)鐘抖動(dòng),數(shù)據(jù)抖動(dòng); 周期抖動(dòng),TIE抖動(dòng),相位抖動(dòng),cycle-cycle抖動(dòng); 峰峰值抖動(dòng)(pk-pk jitter),有效值抖動(dòng)(rms jitter);總體抖動(dòng)(Tj),隨機(jī)抖動(dòng)(Rj),固有抖動(dòng)(Dj);周期性抖動(dòng),DCD抖動(dòng),ISI抖動(dòng),數(shù)據(jù)相關(guān)性抖動(dòng); 定時(shí)抖動(dòng),基于誤碼率的抖動(dòng); 水平線以上的抖動(dòng)和水平線以下的抖動(dòng)…… 這些名詞反應(yīng)了定義抖動(dòng)的不同維度。
回到“什么是抖動(dòng)”的定義吧。其實(shí)抖動(dòng)的定義一直沒(méi)有統(tǒng)一,這可能也是因?yàn)樾枰磉_(dá)清楚這個(gè)概念的維度比較多的原因。目前引用得比較多的定義是: Jitter is defined as the short-term variations of a digital signal’s significant instants from their ideal positions in time. 就是說(shuō)抖動(dòng)是信號(hào)在電平轉(zhuǎn)換時(shí),其邊沿與理想位置之間的偏移量。如圖2所示,紅色的是表示理想信號(hào),實(shí)際信號(hào)的邊沿和紅色信號(hào)邊沿之間的偏差就是抖動(dòng)。什么是“理想位置”,“理想位置”是怎么得到的? 這是被問(wèn)到后最不好回答的問(wèn)題。
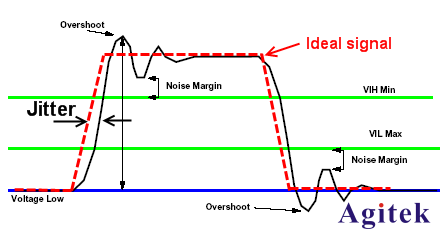
圖2抖動(dòng)的定義
我認(rèn)為描述抖動(dòng)離不開(kāi)“四個(gè)維度”。僅僅是說(shuō)“我想測(cè)量抖動(dòng)”,這是不具體的表達(dá)。我建議的一種完整的表達(dá)方式是: 我想測(cè)量100萬(wàn)樣本(一定數(shù)量樣本)下的時(shí)鐘抖動(dòng)(或 數(shù)據(jù)抖動(dòng))的周期抖動(dòng)(或 TIE抖動(dòng),相位抖動(dòng),cycle-cycle抖動(dòng))的峰峰值抖動(dòng)和有效值抖動(dòng)(或Tj,Rj,Dj)。 具體的測(cè)量方法上就是先測(cè)量被測(cè)信號(hào)的周期(或TIE,Cycle-cycle period)等參數(shù),然后持續(xù)測(cè)量出100萬(wàn)個(gè)甚至更多樣本,將這100萬(wàn)個(gè)樣本下參數(shù)測(cè)量結(jié)果的最大值和最小值相減即為峰峰值抖動(dòng)。但是10的12次方樣本很難直接測(cè)量出來(lái),因?yàn)樾枰牡臅r(shí)間太長(zhǎng),所以就改用數(shù)學(xué)模型預(yù)測(cè)的方法進(jìn)行推導(dǎo)。
上面表達(dá)中涉及到抖動(dòng)定義的四個(gè)維度是:
(1)測(cè)量抖動(dòng)的樣本數(shù)/誤碼率。
(2)被測(cè)信號(hào)的類型。分為時(shí)鐘抖動(dòng)和數(shù)據(jù)抖動(dòng)。
(3)關(guān)注的抖動(dòng)參數(shù)的類型。主要有周期抖動(dòng),TIE抖動(dòng),cycle-cycle抖動(dòng)。
(4) 抖動(dòng)測(cè)量結(jié)果的類型。主要有峰峰值抖動(dòng),有效值抖動(dòng),總體抖動(dòng)(Tj),固有抖動(dòng)(Dj),隨機(jī)抖動(dòng)(Rj)。
3,抖動(dòng)是關(guān)于誤碼率的函數(shù)
我們下意識(shí)里可能會(huì)問(wèn),被測(cè)信號(hào)的抖動(dòng)最壞能有多大? 其實(shí),隨著觀察到的測(cè)量樣本數(shù)的增加,這個(gè)問(wèn)題的答案也就不一樣。沒(méi)有樣本數(shù)的限定,這個(gè)問(wèn)題沒(méi)有一個(gè)收斂性的答案。抖動(dòng)是關(guān)于誤碼率的函數(shù)。誤碼率為10e-12(10的-12次方)即表示發(fā)送端發(fā)送10e+12(10的12次方)個(gè)比特位的信號(hào),在接收端出現(xiàn)誤碼的比特位個(gè)數(shù)是一個(gè)。測(cè)量10e-12誤碼率下的抖動(dòng)可以理解為測(cè)量10e+12樣本下的抖動(dòng)。
4,時(shí)鐘抖動(dòng)VS數(shù)據(jù)抖動(dòng) / 水平線以上的抖動(dòng) VS 水平線以下的抖動(dòng)
當(dāng)我們?cè)诙x抖動(dòng)具有四個(gè)維度時(shí),特別強(qiáng)調(diào)被測(cè)信號(hào)的類型分為時(shí)鐘抖動(dòng)和數(shù)據(jù)抖動(dòng),這是否意味著兩種抖動(dòng)的測(cè)量方法是完全不一樣的呢? 其實(shí),我們可以將時(shí)鐘信號(hào)理解為一種特別的數(shù)據(jù)。所有用于數(shù)據(jù)抖動(dòng)的測(cè)量方法理論上都可以用于測(cè)量時(shí)鐘,只是因?yàn)闀r(shí)鐘信號(hào)非常簡(jiǎn)單,是規(guī)則的010101…碼型,因此,對(duì)于時(shí)鐘抖動(dòng)通常是通過(guò)直接測(cè)量一定數(shù)量的樣本(樣本數(shù)量應(yīng)該是多少一般也沒(méi)有統(tǒng)一的定義,甚至在有的時(shí)鐘芯片手冊(cè)中也沒(méi)有說(shuō)明)的參數(shù)結(jié)果,統(tǒng)計(jì)得出參數(shù)變化大小的pk-pk值,即為峰峰值抖動(dòng)(pk-pk jitter)。 峰峰值抖動(dòng)隨著測(cè)量時(shí)間的增加,測(cè)量結(jié)果會(huì)變大。峰峰值抖動(dòng)的測(cè)量結(jié)果不具備重復(fù)性,因?yàn)殡S機(jī)抖動(dòng)理論上是無(wú)限發(fā)散的。有效值抖動(dòng)(rms jitter)表示參數(shù)變化大小的標(biāo)準(zhǔn)偏差值。 我們將這種定量方法直接測(cè)量出來(lái)的抖動(dòng)形象地稱為“水平線以上的抖動(dòng)”,因?yàn)檫@種抖動(dòng)結(jié)果是不需要借助數(shù)學(xué)模型進(jìn)行推導(dǎo)和預(yù)測(cè)的。 這種方法的抖動(dòng)也叫“定時(shí)抖動(dòng)(Timing jitter)”。 時(shí)鐘抖動(dòng)關(guān)注的信號(hào)參數(shù)類型主要有周期(period),TIE(Time Interval Error)和相鄰周期間(Cycle-Cycle Period),對(duì)于時(shí)鐘信號(hào)的單獨(dú)研究,通常三種參數(shù)的抖動(dòng)都需要測(cè)量。
數(shù)據(jù)抖動(dòng)關(guān)注的是一定誤碼率下的TIE抖動(dòng),現(xiàn)在的串行數(shù)據(jù)測(cè)量領(lǐng)域通常默認(rèn)的都是10e-12誤碼率,也就是說(shuō)需要測(cè)量10e+12樣本,這需要泰克示波器測(cè)量幾個(gè)小時(shí)甚至幾天的時(shí)間,即使最快的示波器也無(wú)法“硬”測(cè)量出10e+12樣本的參數(shù)來(lái)作為測(cè)量結(jié)果,因此,就需要根據(jù)某種數(shù)學(xué)模型來(lái)基于當(dāng)前一定數(shù)量的樣本數(shù)測(cè)量的結(jié)果來(lái)“預(yù)測(cè)”10e+12的樣本下的抖動(dòng)結(jié)果,這種基于數(shù)學(xué)模型預(yù)測(cè)的方法測(cè)量的抖動(dòng)叫“水平線以下的抖動(dòng)”。所謂抖動(dòng)的風(fēng)云變幻即在于一直在爭(zhēng)論使用什么樣的數(shù)學(xué)模型來(lái)預(yù)測(cè)抖動(dòng)是最準(zhǔn)確的。很多抖動(dòng)相關(guān)的文章就是在用一連串的數(shù)學(xué)公式來(lái)說(shuō)明作者發(fā)現(xiàn)的一種新模型是更準(zhǔn)確的,看得您云里來(lái)霧里去的。
以上就是有關(guān)泰克示波器抖動(dòng)測(cè)量的介紹,由于篇幅問(wèn)題,這里我們只介紹了一部分。更多信息,歡迎持續(xù)關(guān)注安泰測(cè)試。




 關(guān)注官方微信
關(guān)注官方微信
